The CML Lab focuses on high-fidelity numerical, experimental, and data-driven modeling of coupled physical phenomena in complex engineering systems. Our research spans fluid-structure interaction, multiphase flows, marine and offshore systems, underwater acoustics, bioinspired propulsion, and intelligent avian and aquatic robotic vehicles. We take a system-level view while advancing predictive modeling, control, optimization, physics-guided machine learning, and digital twins for integrated multiphysics systems. Through this work, the Lab develops computational methods, design guidelines, and engineering technologies for marine, offshore, aerospace, clean energy, bioinspired engineering, and ocean robotics applications. Current research program is organized around the following interconnected projects:
(1) Multiphysics Prediction, Control, and Optimization for Intelligent and Green Marine Vessels (IGMVs)
Marine vessel design is a highly multidisciplinary process involving hydrodynamics, structures, stability, control, propulsion, noise, and environmental performance. Because full prototype-based design is rarely practical, current approaches often rely on semi-empirical methods and past experience. There is significant potential to advance marine vessel design and operation through AI-enabled cognitive systems, bioinspired concepts, physics-guided machine learning, and quieter, more efficient, and environmentally responsible technologies.
This research program develops hybrid physics-based and data-driven methods for intelligent green marine vessels. Since purely black-box machine learning models often lack reliability, interpretability, and generalization beyond training data, our focus is on integrating computational mechanics, dynamical systems, multiphysics simulation, and machine learning into trustworthy digital twins for marine systems. The program emphasizes four interconnected thrusts: high-performance and data-driven multiphysics computing; hull, propeller, and system optimization for efficiency and noise reduction; marine environmental protection through reduced underwater noise and emissions; and advanced digital tools for shipyard productivity and engineering design. Through collaboration with Seaspan Shipyards and its partners, the program aims to develop next-generation tools and technologies for Canadian naval, coast guard, and commercial marine applications.
The primary objective is to scale multiphysics and multiscale computing for practical engineering analysis, with emphasis on flow dynamics and coupled fluid-structure problems. Key research topics include advanced hydrodynamics and multiphase fluid-structure simulations, propeller cavitation and vortex-induced noise, hydroelastic CFD-acoustic coupling, passive and active control of vessel noise and resistance, reduced-order modeling, and integration of multifidelity models with machine learning.

(2) Physics-Guided Digital Twin and Bio-inspired Hybrid Aerial-Aquatic Vehicles
Bioinspired engineering offers new pathways for designing agile, efficient, and low-noise autonomous vehicles. Natural flyers and swimmers, such as bats, birds, rays, and fish, use flexible, morphing, and adaptive surfaces to achieve high maneuverability, propulsion efficiency, and acoustic stealth in complex environments. Inspired by these biological systems, this research develops computational, experimental, and data-driven models for flexible wings and fins, with applications in aerial, aquatic, and hybrid aerial-aquatic robotics.
The project focuses on the coupled fluid-structure dynamics of flapping and undulatory propulsion, and on translating this knowledge into intelligent robotic systems. Using multiphysics simulations, flexible multibody dynamics, sensor fusion, physics-guided machine learning, and digital twins, we study how bioinspired vehicles can adapt their shape, motion, sensing, and control strategies in response to unsteady flows, waves, turbulence, and multiphase air-water interfaces.
Aligned with the vision of Swarm Coordinated Ocean Robotics, this work supports the development of quiet, efficient, and autonomous bioinspired AUVs and hybrid robotic platforms for coastal monitoring, Arctic operations, environmental stewardship, search and rescue, surveillance, and maritime security. A particular emphasis is placed on ray-inspired underwater vehicles, ultra-low underwater radiated noise, multi-modal sensor fusion, AI-driven control, predictive digital twins, and coordinated deployment with uncrewed surface vessels. These technologies aim to enable accessible, community-centred, and environmentally responsible ocean observation in partnership with Indigenous communities, government agencies, and marine-sector partners.
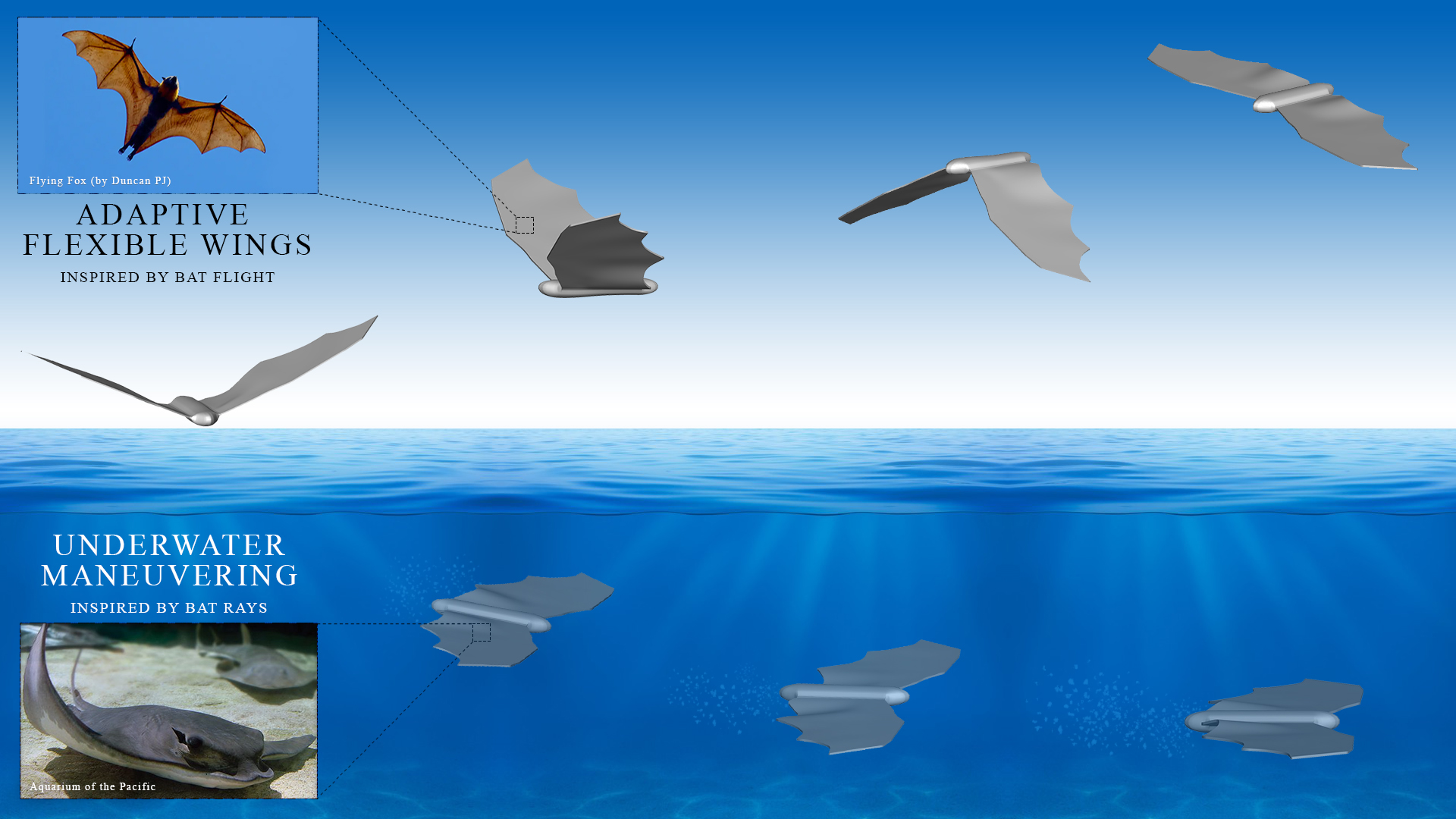
Concept of hybrid avian-aquatic vehicle based on bio-inspiration
(3) Physics-Guided AI and Fluid-Structure Interaction Modeling for Marine Hydrokinetic Energy
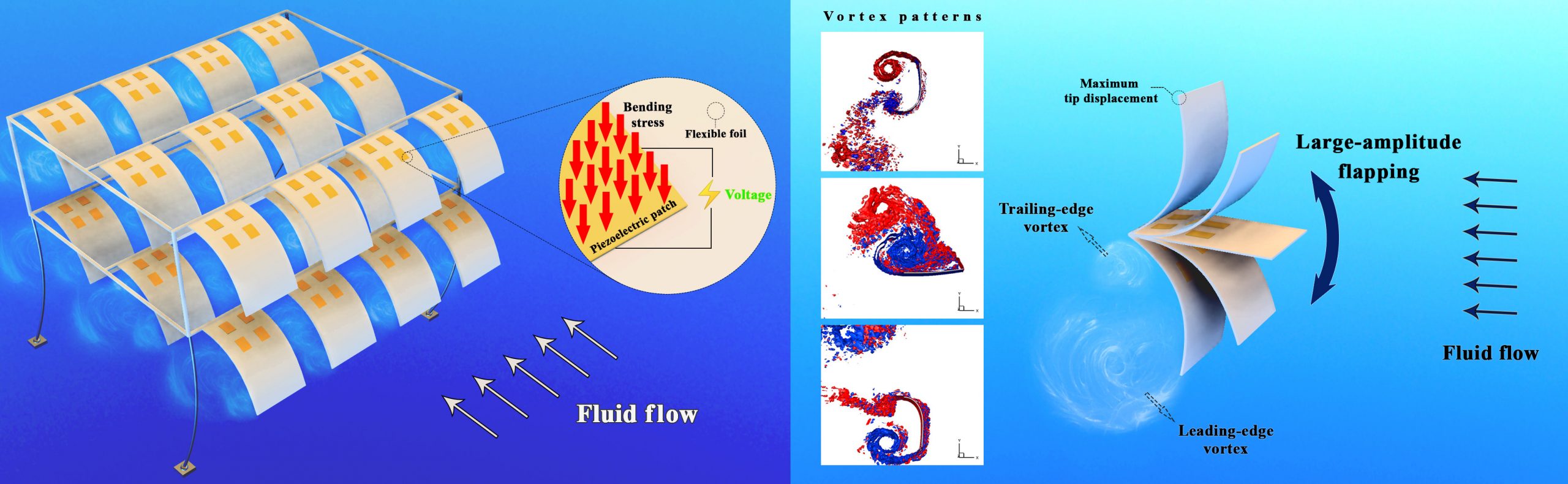
This project advances a new paradigm for harvesting energy from ocean flows by transforming flow-induced vibration from a design challenge into a source of autonomous power. Flexible and elastically mounted inverted foils can undergo self-sustained, large-amplitude flapping in currents, converting ambient fluid energy into structural motion and, through piezoelectric or electromagnetic transduction, into usable electricity for low-power sensors and distributed ocean platforms.
Building on our work on inverted-foil dynamics, this project develops physics-guided AI, high-fidelity fluid-structure interaction simulations, and reduced-order scaling laws to understand and optimize energy harvesting from single foils and interacting foil arrays. A central outcome is a predictive digital-twin framework that combines multiphysics modeling, effective stiffness-based design coordinates, hypergraph neural network surrogates, and explainable AI to enable fast, trustworthy prediction of flapping response, energy transfer, and array performance.
The broader vision is to create intelligent, adaptive, and low-impact marine energy systems that can power persistent sensing in coastal, offshore, and Arctic environments. By integrating computational mechanics, machine learning, control, and digital twins, this project supports the future of self-powered ocean monitoring, resilient marine infrastructure, and sustainable blue-energy technologies.
(4) Physics-Based Machine Learning Framework for Near-Field Noise from Hull and Propeller (HARP)
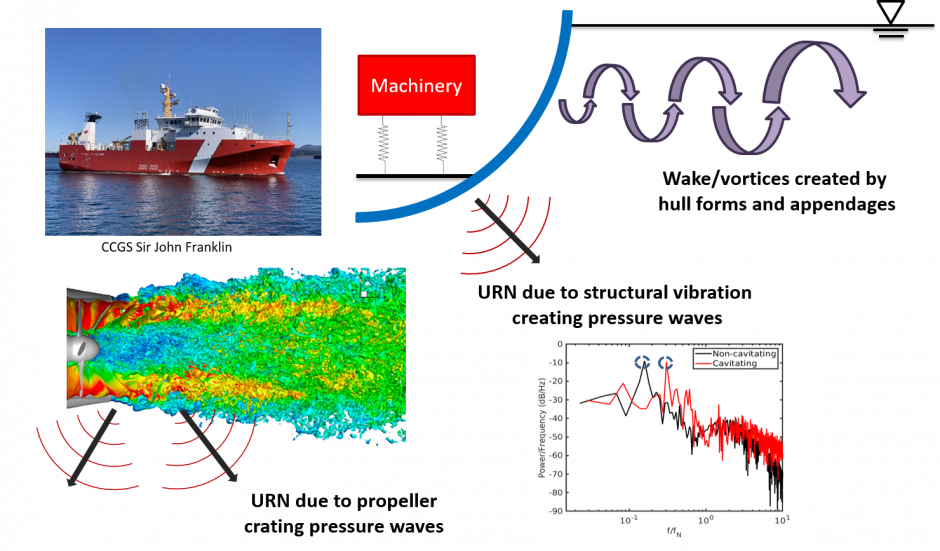
Underwater radiated noise is a defining challenge for both sustainable shipping and naval operations. For commercial vessels, excessive noise affects marine mammals and coastal ecosystems. For naval and subsea platforms, the same physics governs acoustic detectability, submarine stealth, signature management, and maritime security. A unified capability to predict, reduce, and control hull, machinery, propeller, and cavitation noise is therefore central to quieter oceans, next-generation vessel design, and Canada’s defence and Arctic sovereignty priorities.
This project develops a physics-guided machine learning framework for near-field noise prediction from hull-propeller systems, with emphasis on propeller cavitation, hull-propeller interaction, hydroelastic vibration, machinery-induced noise, and fluid-structure-acoustic coupling. High-fidelity CFD, FEM, and acoustic simulations provide training and validation data, while physics-based ML models accelerate prediction across operating conditions, geometries, and design configurations. The resulting HARP toolbox will enable fast, trustworthy noise assessment at the early design stage, when vessel quieting, cavitation control, and acoustic signature reduction can have the greatest impact.
The broader vision is to create a digital engineering platform for intelligent acoustic design and control of marine, subsea, and naval systems. By integrating multiphysics simulation, sensor-informed digital twins, optimization, and control, this project supports low-noise ship design, submarine stealth, Arctic operations, marine mammal protection, and maritime domain awareness. Within MASI center, HARP forms a core capability linking hydrodynamics, underwater acoustics, AI, digital twins, defence and security, and responsible ocean technology.
(5) Machine Learning Framework for Anthropogenic Noise and Ocean Soundscape (MELO)
Anthropogenic noise from shipping, offshore activity, naval operations, and coastal infrastructure is reshaping ocean soundscapes. This has major implications for marine mammals, Indigenous and coastal stewardship, sustainable shipping, and maritime security. While physics-based acoustic models provide essential insight into sound generation and propagation, they are difficult to scale across distributed vessel traffic, uncertain ocean conditions, complex bathymetry, and multi-resolution data from AIS, hydrophones, ocean models, and simulations.
This project develops the MELO framework: a physics-guided AI toolbox for predicting anthropogenic noise fields and ocean soundscapes across space, time, and operating conditions. By integrating acoustic propagation models, vessel-source characterization, hydrophone observations, AIS-based traffic data, environmental conditions, and machine learning, MELO will enable fast prediction of noise exposure at ecologically sensitive locations, marine mammal corridors, and strategically important maritime regions. The project also supports dual-use applications in underwater domain awareness, submarine stealth, acoustic signature management, and detection of anomalous vessel activity. The same predictive soundscape intelligence that helps reduce vessel noise and protect marine life can also strengthen maritime situational awareness, Arctic operations, subsea infrastructure protection, and national security.
The broader vision is to move from passive noise assessment to adaptive ocean intelligence. MELO will support decision tools that recommend vessel speed, routing, timing, and operating conditions to reduce underwater radiated noise while maintaining safe, efficient, and secure marine operations. Within MASI, this project forms a core capability linking ocean acoustics, digital twins, AI, marine mammal protection, Indigenous and coastal stewardship, submarine technologies, and underwater domain awareness.

(6) Intelligent Marine Vessel Optimization for GHG Emissions (IMOG)
This NSERC Alliance project, in collaboration with Elomatic and InnovMarine, develops an AI-enabled digital engineering framework for designing the next generation of low-noise, low-carbon marine vessels. The project integrates high-fidelity CFD, computational multiphysics, physics-guided machine learning, generative AI, hydrodynamic optimization, propulsion modeling, underwater radiated noise prediction, and greenhouse gas (GHG) emissions analysis into an intelligent design environment for marine vessels.
A key innovation is the development of diffusion probabilistic models (DDPMs) and reward-directed generative optimization for rapid exploration of high-performance hull forms. By combining generative AI, surrogate modeling, multi-objective optimization, and high-fidelity CFD, the framework enables efficient optimization of hull geometry, propulsion systems, and operational profiles to simultaneously reduce resistance, fuel consumption, underwater radiated noise, and lifecycle emissions. The methodology supports both new vessel design and retrofit strategies while providing practical decision-support tools for naval architects and ship designers.
The broader vision is to establish an AI-enabled digital engineering platform for intelligent, quiet, and net-zero marine transportation. The IMOG framework advances predictive digital twins for sustainable ship design, helping industry accelerate innovation, improve regulatory readiness, and strengthen Canada’s leadership in marine engineering, intelligent ship design, and AI-enabled maritime decarbonization.


Financial Support:
![]()

![]()